So, you want to connect your bot or drone to altrubots but dont know the right way?
6-06-2020
This guide will help. Essentially, you need to choose between two connectivity options. One option is "direct internet" via wifi (IEEE 802.11) or cellular internet link. If wifi isnt an option or you want long range control you can also use standard RC equipment. When setup in any of the below fashions, your bot or drone will be able to be controlled by the internet from altrubots.com!
DIRECT INTERNET
A small companion computer, such as a Raspberry Pi or Cellular Device, can connect to the Altrubots servers for internet control and video calling. This companion computer will send any messages it recieves to a microcontroller which controls any other drivers or motor controllers. The pi can be connected to the Arduino via USB. The Pi runs the Altrubots python client, which connects to the Altrubots backend and relays user commands it recieves to the arduino. The arduino then parses these messages and sends an apropriate signal to the apropriate motor controller. We generally use Sabertooth 2 motor drivers for land or water bots using trolling motors. You can also use Sabertooth motor controllers for linear actuators and can hook up as many controllers as the arduino has digital pins! Just be sure to ground all of your microcontrollers and motor controllers or the signal will be poor. Also, be sure to correctly set all DIP switches on the sabertooth.

RC Control
Sometimes you dont have the luxury of wifi or want the signal integrity of modern "long range" RC Equipment. Or you want to control a typically RC application, such as a quadcopter or fpv drone, from the internet. Luckily, Altrubots RC Anywhere easily integrates with common RC Equipments to control your bot, quad or drone at long range over the internet. Simply grab a laptop or PC to run the altrubots python client and connect to our servers. Then plug in an Arduino via USB that will generate a Pulse Pulse Modulation (PPM) train based off the commands users on the web ui send. Attach the trainer port of your RC Transmitter to a digital pin of an arduino and then wire up your RX to the bot. You can wire the bot exactly like you would for regular remote control! We utilize full size TBS Crossfire TX and RX. These are awesome conn links, but they come with responsibility! You need to have a HAM liscense if anyone from the US government is going to know you are using them on US soil. Your country might have its own laws.
The Video can be aquired from the vehicle via standard or digital FPV equipment as well! Using a digital FPV system such as the Fat Shark Byte Frost works easily. Simply convert the RX hdmi out of the Bytefrost Reciever to a UVC compatible format using an Elgato Camlink hooked up to another USB port on your laptop! The Elgato rapidly captures and converts inbound HDMI signals and converts them

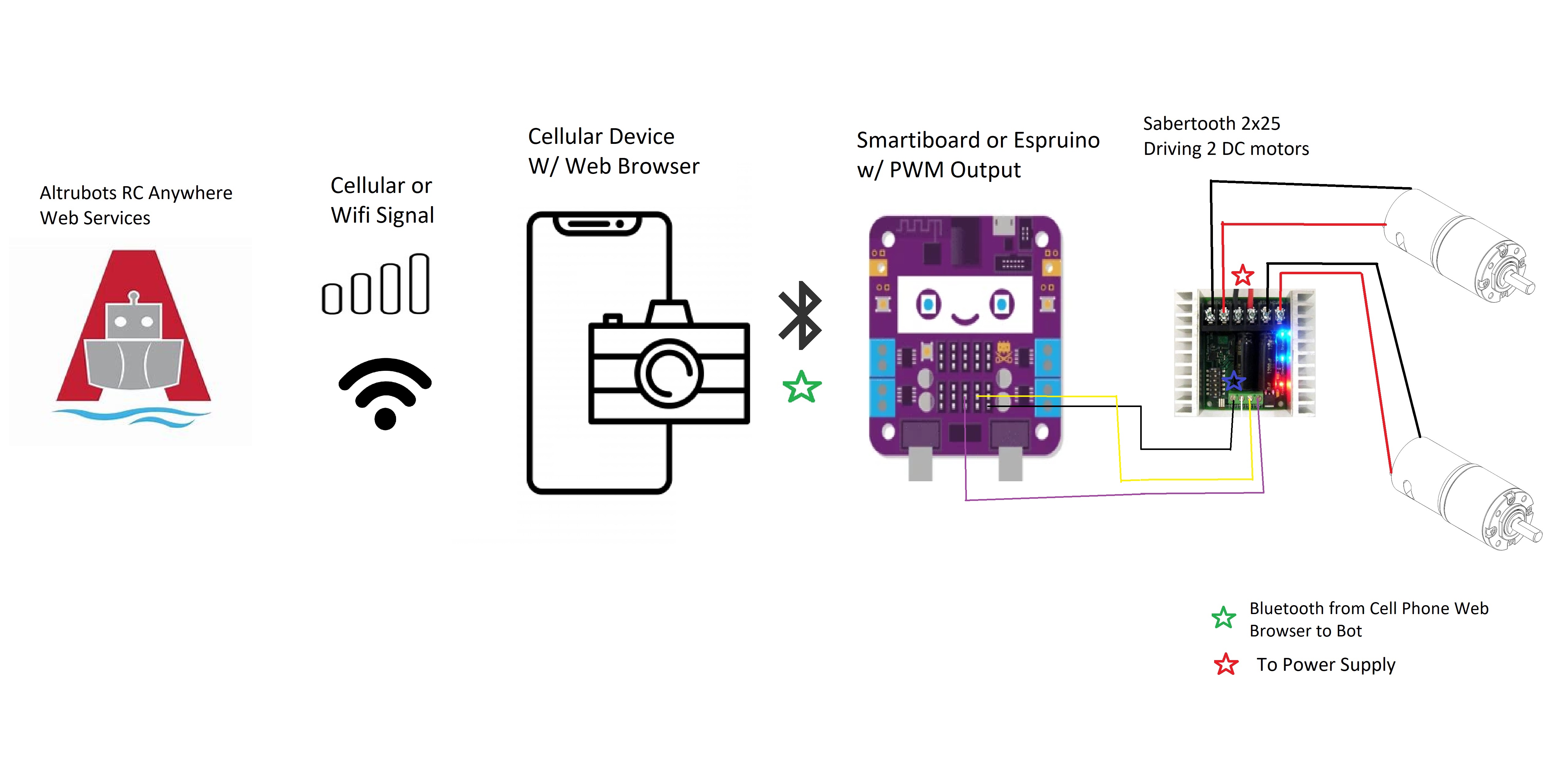
Cell Phone Robot Control
You can always use your cell phone and the wonders of modern cellular data services to control your robot with telepresence. If your cell phone has a camera and a web browser, you can use that to handle the video controls of your bot. A Javascript client in the web browser can then open up a bluetooth connection to a microcontroller that runs your bot code. Boards like the Smartiboard from Smartibot are proven to work with this system. Check out a sample driving page: HERE!
This control setup provides awesome power to your cellphone! Now it can allow people to pilot robots with it from anywhere in the world!
Author Credits
Altrubots
6-06-2020
If you have any questions, just give us an email!